サンプルプログラム N446RE_CDC の説明

USBのCDCクラス
(The Communication Device Class)を使用して、
VCP(仮想COMポート)による、
非同期シリアル通信を行うプログラムです。
STMicroelectronics社製の
評価用基板、NUCLEO-F446RE と
freeの開発ツール、STM32CubeIDE を
使用しています。
えがおのでんし製の試験用基板 Base-N446RE を使用して動作を確認しています。
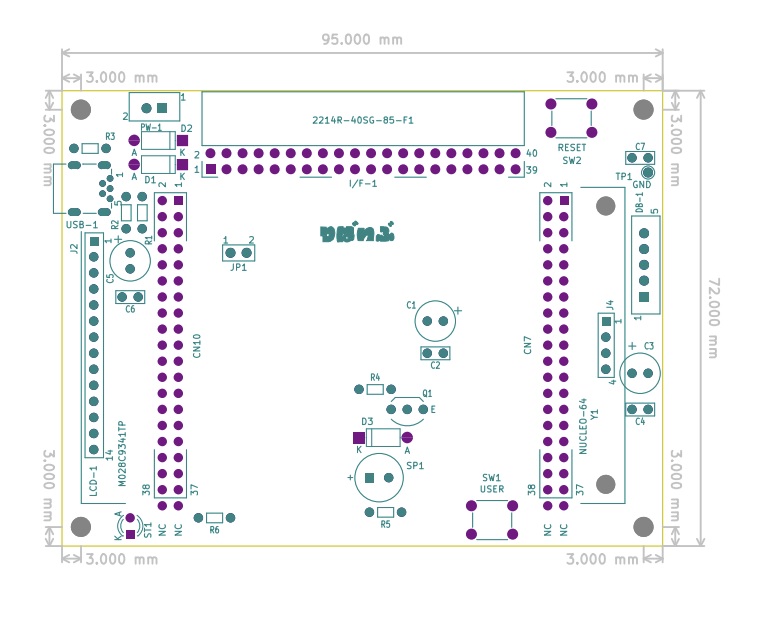
基板については、
Base-N446RE基板 の説明 をご覧ください。
目次
概要
サンプルプログラム N446RE_CDC のソース
PCとのUSB接続
サンプルプログラム N446RE_CDC の説明
N446RE_CDC の構成
N446RE_CDC の動作パラメータの定義
ユーザープログラムの実行開始位置
N446RE_CDC のmain()の説明
1) 初期化の部分
2) LED点滅 と CDC通信処理 の部分
CDC通信処理 Communicate_CDC の説明
VCPドライバのインストール
USBのCDC通信を行うためには、
STMicroelectronics社が提供するVCP(仮想COMポート)ドライバを
PCにインストールする必要があります。
PCアプリケーション Access_UART
サンプルプログラム N446RE_CDC を試験するためのPCアプリケーションです。
概要
サンプルプログラム N446RE_CDCはUSBのCDCクラス
(The Communication Device Class)を使用して、非同期シリアル通信を行います。
PCからデータを受信すると、データを判定してLED点滅コマンドなら、指定に従って
点滅間隔を変更します。
また、受信したデータをエコーバックします。
サンプルプログラム N446RE_CDC のソース
STM32CubeIDE 1.7.0 を使用して作成しました。
ここからサンプルプログラム R_N446RE_CDC.zip をダウンロードしてください。
PCとのUSB接続
USBコネクタ部の回路を以下に示します。
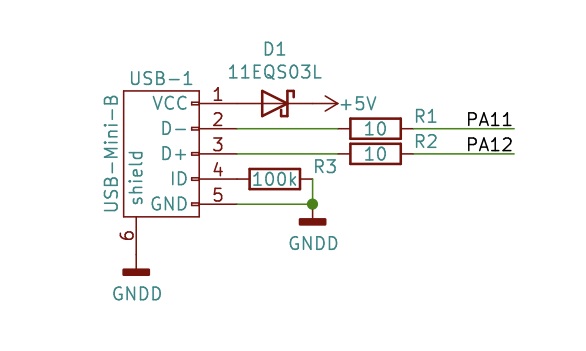
これは、えがおのでんし製の試験基板 Base-N446RE-V1 のUSB部分の回路です。
USBコネクタには Mini-B を使用しています。
PCとBase-N446RE-V1のUSB-1とを、USBケーブル(A - Mini B)で接続します。
サンプルプログラム N446RE_CDC の説明
STM32F446REのCDC通信を行うプログラムです。
PCが送信したコマンドを受信して、コマンドに応じてLEDの点滅間隔を変化させます。
プロジェクトを最初に開いた画面は以下のようになります。
以下、サンプルプログラム N446RE_CDC について説明していきます。
サンプルプログラムの構成
STM32CubeIDEの画面左側、Project Explorerの
N446RE_CDCを展開した画面は以下のようになります。
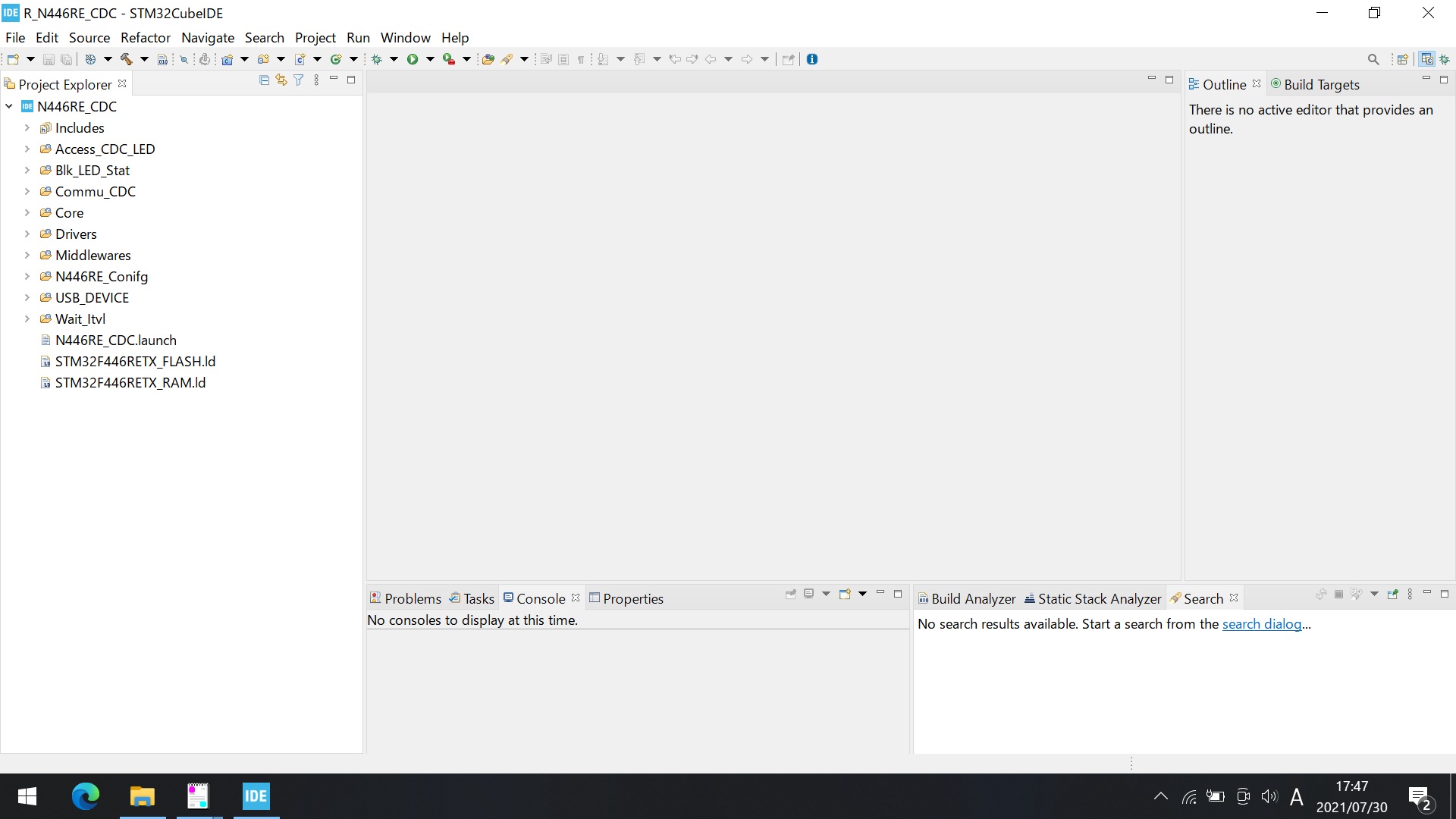
サンプルプログラム N446RE_CDC の構成を以下に示します。
N446RE_CDC
|
|- Includes
|
|- Access_CDC_LED : LED点滅コマンド処理
| |- Access_CDC_LED.c
| |- Access_CDC_LED.h
|
|- Blink_LED_Stat : Status LED点滅処理
| |- Blink_LED_Stat.c
| |- Blink_LED_Stat.h
|
|- Commu_CDC : CDC通信処理
| |- Commu_CDC.c
| |- Commu_CDC.h
|
|- Core
| |- Inc
| | |- main.h
| | |- stm32f4xx_hal_conf.h
| | |- stm32f4xx_it.h
| |
| |- Src
| | |- main.c
| | |- stm32f4xx_hal_msp.c
| | |- stm32f4xx_it.c
| | |- syscalls.c
| | |- system.c
| | |- system_stm32f4xx.c
| |
| |- Startup
|
|- Drivers
|
|- Middlewares
| |- ST
| |
| |- STM32_USB_Device_Library
| |- Class
| | |- CDC
| | |- Inc
| | | |- usbd_cdc.h
| | |
| | |- Src
| | |- usbd_cdc.c
| |
| |
| |- Core
| |- Inc
| | |- usbd_core.h
| | |- usbd_ctrreq.h
| | |- usbd_def.h
| | |- usbd_ioreq.h
| |
| |- Src
| |- usbd_core.c
| |- usbd_ctrreq.c
| |- usbd_ioreq.c
|
|- N446RE_Config : 動作パラメータの定義
| |- Dev_Conf.h
|
|- USB_DEVICE
| |- App
| | |- usb_device.c
| | |- usb_device.h
| | |- usbd_cdc_if.c
| | |- usbd_cdc_if.h
| | |- usbd_desc.c
| | |- usbd_desc.h
| |
| |- Target
| |- usbd_conf.c
| |- usbd_conf.h
|
|- Wait_Itvl : 時間待ち処理
| |- Wait_Itvl.c
| |- Wait_Itvl.h
|
|- N446RE_CDC.launch
|- STM32F446RETX_FLASH.ld
|- STM32F446RETX_RAM.ld
N446RE_CDC の動作パラメータの定義
サンプルプログラム N446RE_CDC の 動作パラメータの定義を
N446RE_Config/Dev_Conf.h に記述しています。
使用する CPU の定義、ヘッダ名の定義、GPIO のポートとピンの定義、
などを記述しています。
ユーザープログラムの実行開始位置
プログラムは、int main(void) から実行開始します。
int main(void) は、フォルダ Core/Src/main.c にあります。
STM32CubeIDEでビルドされたプログラムは、自動的にCPUの初期化を
行った後、int main(void) を呼び出します。
ユーザーコード(記述したプログラム)は、
int main(void) の先頭から実行されます。
N446RE_CDC のmain()の説明
サンプルプログラム N446RE_CDC の main() の記述は、
以下のとおりです。
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t uint8_JobNum_LED = 0;
uint8_t uint8_JobNum_CDC = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
//------------------------------------------------
// Status LED(緑) : 点灯1000mSec / 消灯2000mSec消灯
//------------------------------------------------
GLB_uint16_Time_LED_Stat_ON = (uint16_t)1000;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)2000;
//------------------------------------------------
//------------------------------------------------
// Status LEDのGPIO初期化
//------------------------------------------------
Init_LED_Stat();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//------------------------------------------------------
// Status LED点滅
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// uint16_t uint16_Time_ON : 点灯時間
// uint16_t uint16_Time_OFF : 消灯時間
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Blk_LED_Stat(&uint8_JobNum_LED,
GLB_uint16_Time_LED_Stat_ON, GLB_uint16_Time_LED_Stat_OFF);
//------------------------------------------------------------
// CDC通信処理
//------------------------------------------------------------
// 処理内容 :
// 1. CDCの初期化がされていない場合、初期化します。
// 2. 受信が発生するのを待ち、受信データを取得します。
// 3. 受信データを判定して、内容に従い処理を行います。
// 4. 受信データによる処理の結果、送信データがセットされた場合、送信処理を行います。
//------------------------------------------------------------
// 引数 :
// uint8_t *puint8_JobNum : 処理番号が格納される変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG終了
//------------------------------------------------------------
Communicate_CDC(&uint8_JobNum_CDC);
}
/* USER CODE END 3 */
}
1) 初期化の部分
a) CPUのPeripheral初期化
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
により、CPUのPeripheralなどの基本的な初期化を行います。
PeripheralとはCPUの周辺インターフェースなどのことを言います。
プロジェクト構築時に自動的に組み込まれる、
HAL Drivers(フォルダ Drivers/STM32F4xx_HAL_Drivers) 内に記述されています。
b) CPU動作クロックの設定
/* Configure the system clock */
SystemClock_Config();
CPUの動作クロックとPeripheralの動作クロックを設定します。
SystemClock_Config(); の設定内容は、
int main(void)
{
.
.
.
}
の、すぐ下に記述されています。
c) LEDの初期化
初期の点滅時間をセットした後、Init_LED_Stat(); を呼び出して
LEDが接続されているピンを出力に設定しています。
//------------------------------------------------
// Status LED(緑) : 点灯1000mSec / 消灯2000mSec
//------------------------------------------------
GLB_uint16_Time_LED_Stat_ON = (uint16_t)1000;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)2000;
//------------------------------------------------
//------------------------------------------------
// Status LEDのGPIO初期化
//------------------------------------------------
Init_LED_Stat();
2) LED点滅 と CDC通信処理 の部分
永久ループ部分の記述を以下に示します。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//------------------------------------------------------
// Status LED点滅
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// uint16_t uint16_Time_ON : 点灯時間
// uint16_t uint16_Time_OFF : 消灯時間
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Blk_LED_Stat(&uint8_JobNum_LED,
GLB_uint16_Time_LED_Stat_ON, GLB_uint16_Time_LED_Stat_OFF);
//------------------------------------------------------------
// CDC通信処理
//------------------------------------------------------------
// 処理内容 :
// 1. CDCの初期化がされていない場合、初期化します。
// 2. 受信が発生するのを待ち、受信データを取得します。
// 3. 受信データを判定して、内容に従い処理を行います。
// 4. 受信データによる処理の結果、送信データがセットされた場合、送信処理を行います。
//------------------------------------------------------------
// 引数 :
// uint8_t *puint8_JobNum : 処理番号が格納される変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG終了
//------------------------------------------------------------
Communicate_CDC(&uint8_JobNum_CDC);
}
/* USER CODE END 3 */
Status LED点滅処理 Blk_LED_Stat と CDC通信処理 Communicate_CDC を呼び出しています。
Communicate_CDC では、コマンドを受信して、コマンドの内容に応じて
LEDの点滅時間変更を行います。
CDC通信処理 Communicate_CDC の説明
データを受信して、LED点滅コマンドの場合、コマンドの内容に応じて、LEDの点滅間隔を変更します。
受信したデータはエコーバックされます。
LED点滅コマンドは以下の通りです。
LED1 B0%00 : 1000mSec 点灯 / 2000mSec 消灯
LED1 B1%00 : 100mSec 点灯 / 100mSec 消灯
LED1 B2%00 : 200mSec 点灯 / 200mSec 消灯
LED1 B3%00 : 300mSec 点灯 / 300mSec 消灯
LED1 B4%00 : 400mSec 点灯 / 400mSec 消灯
LED1 B5%00 : 500mSec 点灯 / 500mSec 消灯
%00 は 0x00 を表します。
Communicate_CDC は Commu_CDC/Commu_CDC.c 内にあります。
以下に、Communicate_CDC のコードを示します。
//------------------------------------------------------------
// CDC通信処理
//------------------------------------------------------------
// 処理内容 :
// 1. CDCの初期化がされていない場合、初期化します。
// 2. 受信が発生するのを待ち、受信データを取得します。
// 3. 受信データを判定して、内容に従い処理を行います。
// 4. 受信データによる処理の結果、送信データがセットされた場合、送信処理を行います。
//------------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号が格納される変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG終了
//------------------------------------------------------------
int16_t Communicate_CDC(uint8_t *puint8_JobNum)
{
static uint8_t STC_uint8_JobNum_CDC;
int16_t int16_ReceiveLength;
int16_t int16_Return;
switch(*puint8_JobNum)
{
case 0:
//-----------------------------------
// 初期化フラグの判定
//-----------------------------------
if(GLB_int16_vCDC_Initialize <= 0){
//---------------------------------------------------
// 初期化済みでない場合、CDC通信パラメータ初期化 と CDC初期化を行います。
//---------------------------------------------------
Initialize_Communicate_CDC();
GLB_int16_vCDC_Initialize = 1; // CDC初期化フラグON
}
GLB_uint16_vCDC_SendLength = 0; // 送信データ長クリア
STC_uint8_JobNum_CDC = 0; // CDC通信処理番号初期化
(*puint8_JobNum)++; // 処理番号をインクリメント : 次の処理番号に移行する。: case 1:
int16_Return = -1; // 処理継続
break;
case 1:
//--------------------------------------------------
// CDCによるVCP受信処理
//--------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号が格納される変数のポインタ
// 戻り値:
// -1 : 受信なし
// 0 : 受信なし
// 1以上 : 受信byte数 : 受信終了
//--------------------------------------------------
int16_ReceiveLength = Receive_CDC(&STC_uint8_JobNum_CDC);
if(int16_ReceiveLength <= 0){
// 受信なしの場合
int16_Return = -1; // 処理継続
break; // 処理番号維持 : case 1: を繰り返し実行します。
}
//---------------------------------------------------
// 受信を行うまで、この下に行きません。
//---------------------------------------------------
//-----------------------------------------------------------------
// 受信コマンドを実行する。
//-----------------------------------------------------------------
// 引数 :
// uint16_t uint16_ReceiveLength : 受信データ数
// uint8_t *puint8_ReceiveData : 受信データが格納されているBufferのポインタ
// uint8_t *puint8_SendData : 応答送信データを格納するBufferのポインタ
// 戻り値 : 応答送信データ数
//-----------------------------------------------------------------
GLB_uint16_vCDC_SendLength = Execute_Command_CDC((uint16_t)int16_ReceiveLength,
GLB_uint8_CDC_ReceiveData,
GLB_uint8_CDC_SendData);
if(GLB_uint16_vCDC_SendLength == 0){
//----------------------------------
// 送信データなしの場合
//----------------------------------
*puint8_JobNum = 0; // 処理番号初期化
int16_Return = 0; // OK終了
break;
}
//----------------------------------
// 送信データがある場合
//----------------------------------
(*puint8_JobNum)++; // 処理番号をインクリメント : 次の処理番号に移行する。: case 2:
int16_Return = -1; // 処理継続
break;
case 2:
//-------------------------------------------------------
// CDC送信セマフォチェック : 他のモジュールでCDC送信を実行していないかをチェックします。
//-------------------------------------------------------
if(GLB_int16_vSemaphore_CDC_Send != 0){
// 使用中
int16_Return = -1; // 処理中
break; // 処理番号維持 : case 2: を繰り返し実行します。
}
//----------------------------------------------------
// 他のモジュールが GLB_int16_vSemaphore_CDC_Send を開放するまで
// この下に行きません。
//----------------------------------------------------
GLB_int16_vSemaphore_CDC_Send = 1; // CDC送信セマフォ取得
(*puint8_JobNum)++; // 処理番号をインクリメント : 次の処理番号に移行する。: case 3:
int16_Return = -1; // 処理中
break;
case 3:
//-----------------------------------------------------------------
// CDCによるVCP送信処理
//-----------------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号が格納される変数のポインタ
// uint16_t uint16_SendLength : 送信データ数
// uint8_t *puint8_SendData : 送信データが格納されているBufferのポインタ
// 戻り値:
// -1 : 送信中
// 0 : 送信終了 : OK
// 1 : エラー
//-----------------------------------------------------------------
int16_Return = Send_CDC(&STC_uint8_JobNum_CDC,
GLB_uint16_vCDC_SendLength, GLB_uint8_CDC_SendData);
if(int16_Return == -1){
// 送信中
break; // 処理番号維持 : 処理継続 : case 3: を繰り返し実行します。
}
//----------------------------------------------
// 送信が終了するまで、この下に行きません。
//----------------------------------------------
GLB_uint16_vCDC_SendLength = 0; // 送信データ長クリア
GLB_int16_vSemaphore_CDC_Send = 0; // CDC送信セマフォ解放
*puint8_JobNum = 0; // 処理番号初期化
// int16_Return : 処理結果
// 処理終了
break;
default:
*puint8_JobNum = 0; // 処理番号初期化
int16_Return = 1; // NG
break;
}
return(int16_Return);
}
1) case 0:
初期化の判定フラグ GLB_int16_vCDC_Initialize を判定して
0 の場合、CDC の初期化を行います。
2) case 1:
CDC の受信処理を行います。
受信が発生して、1回の受信が終了するまで、case 1: をループします。
a) 1回の受信が終了した場合、受信データは GLB_uint8_CDC_ReceiveData にセットされています。
b) 受信コマンド実行 Execute_Command_CDC に GLB_uint8_CDC_ReceiveData を渡して実行します。
受信コマンド実行結果に伴う送信データは GLB_uint8_CDC_SendData にセットされます。
c) 処理番号をインクリメントします。
処理は、case 2: に移行します。
3) case 2:
a) CDC送信セマフォチェックを行います。
他のモジュールがCDC送信を実行していないかチェックして、
実行していなければセマフォを取得します。
b) 処理番号をインクリメントします。
処理は、case 3: に移行します。
4) case 3:
CDCによるVCP送信処理 Send_CDC を実行して、GLB_uint8_CDC_SendData のデータを送信します。
a) 送信が終了するまで、case 3: をループします。
b) 送信が終了すると、処理番号を 0 に初期化して終了します。
Communicate_CDC は再び、処理番号 0 : case 0: から実行されます。
モジュール Execute_Command_LED は、
Access_CDC_LED/Access_CDC_LED.c 内にあるモジュール、
Execute_Command_CDCから呼び出されています。
サンプルプログラム N446RE_CDC では、PCからの受信があった場合、
Execute_Command_CDC という名称で受信処理モジュールを
呼び出すようにしています。
フォルダ Access_CDCにUSBのCDCクラスのための処理モジュールがあります。
他のサンプルプログラムで共通にモジュールを呼び出すために、
ここからExecute_Command_CDCを呼び出すようにしています。
Execute_Command_CDC 内に直接、処理を記述しても構いませんが、
このサンプルプログラムでは、以下のようにして最終的な処理モジュール
Execute_Command_LED を呼び出すようにしています。
以下に、モジュールExecute_Command_CDCのコードを示します。
//-----------------------------------------------------------------------
// uint16_t Execute_Command_CDC は、CDC通信の受信が発生した場合、
// Commu_CDC/Commu_CDC/Commu_CDC.c 内の
// CDC通信処理 int16_t Communicate_CDC の処理により呼び出されます。
//-----------------------------------------------------------------------
// 引数の uint8_t *puint8_SendData にデータをセットして、
// 戻り値に送信データ数を返すと、
// CDC通信処理 int16_t Communicate_CDC の処理によりそのデータが送信されます。
//-----------------------------------------------------------------------
//-----------------------------------------------------------------------
// __weak が先頭に付いていない
// uint16_t Execute_Command_CDC の記述がない場合は、
// Commu_CDC/Commu_CDC.c 内の
// __weak uint16_t Execute_Command_CDC
// を実行します。
//-----------------------------------------------------------------------
// __weak が先頭に付いていない
// uint16_t Execute_Command_CDC の記述が他にある場合は、そちらを実行します。
//-----------------------------------------------------------------------
// よって、この例の場合は、下記の uint16_t Execute_Command_CDC を実行します。
//-----------------------------------------------------------------------
//----------------------------------------------------------------------
// 受信コマンドを実行する。
//----------------------------------------------------------------------
// 引数:
// uint16_t uint16_ReceiveLength : 受信データ数
// uint8_t *puint8_ReceiveData : 受信データが格納されているBufferのポインタ
// uint8_t *puint8_SendData : 応答送信データを格納するBufferのポインタ
// 戻り値:応答送信データ数
//----------------------------------------------------------------------
uint16_t Execute_Command_CDC(uint16_t uint16_ReceiveLength,
uint8_t *puint8_ReceiveData,
uint8_t *puint8_SendData)
{
uint16_t uint16_SendLength = 0;
//----------------------------------------------------------------------
// Command処理
//----------------------------------------------------------------------
//----------------------------------------------------------------------
// 受信コマンドを実行する。 : LED点滅
//----------------------------------------------------------------------
// 引数:
// uint16_t uint16_ReceiveLength : 受信データ数
// uint8_t *puint8_ReceiveData : 受信データが格納されているBufferのポインタ
// uint8_t *puint8_SendData : 応答送信データを格納するBufferのポインタ
// 戻り値:応答送信データ数
//----------------------------------------------------------------------
uint16_SendLength = Execute_Command_LED(uint16_ReceiveLength,
puint8_ReceiveData,
puint8_SendData);
return(uint16_SendLength);
}
//----------------------------------------------------------------------
// 受信コマンドを実行する。 : LED点滅
//----------------------------------------------------------------------
// 引数:
// uint16_t uint16_ReceiveLength : 受信データ数
// uint8_t *puint8_ReceiveData : 受信データが格納されているBufferのポインタ
// uint8_t *puint8_SendData : 応答送信データを格納するBufferのポインタ
// 戻り値:応答送信データ数
//----------------------------------------------------------------------
uint16_t Execute_Command_LED(uint16_t uint16_ReceiveLength,
uint8_t *puint8_ReceiveData,
uint8_t *puint8_SendData)
{
uint16_t uint16_I;
uint16_t uint16_SendLength = 0;
//----------------------------------------------------------------------
// Command処理
//----------------------------------------------------------------------
//------------------------------------------------------------------
// LED1(緑) 点滅間隔切り替え
//------------------------------------------------------------------
if((memcmp(puint8_ReceiveData, "LED1 B0", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯1000mSec / 消灯2000mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)1000;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)2000;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
else if((memcmp(puint8_ReceiveData, "LED1 B1", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯100mSec / 消灯100mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)100;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)100;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
else if((memcmp(puint8_ReceiveData, "LED1 B2", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯200mSec / 消灯200mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)200;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)200;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
else if((memcmp(puint8_ReceiveData, "LED1 B3", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯300mSec / 消灯300mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)300;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)300;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
else if((memcmp(puint8_ReceiveData, "LED1 B4", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯400mSec / 消灯400mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)400;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)400;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
else if((memcmp(puint8_ReceiveData, "LED1 B5", 7) == 0)
&& (puint8_ReceiveData[7] == '\0')){
// LED1(緑) : 点灯500mSec / 消灯500mSec
GLB_uint16_Time_LED_Stat_ON = (uint16_t)500;
GLB_uint16_Time_LED_Stat_OFF = (uint16_t)500;
GLB_int16_Restart_LED_Stat = 1; // Status LED再起動フラグON
}
// エコーバック
for(uint16_I = 0; uint16_I < uint16_ReceiveLength; uint16_I++){
puint8_SendData[uint16_I] = puint8_ReceiveData[uint16_I];
}
uint16_SendLength = uint16_ReceiveLength;
return(uint16_SendLength);
}
VCPドライバのインストール
USBのCDC通信を行うためには、
STMicroelectronics社が提供するVCP(仮想COMポート)ドライバを
PCにインストールする必要があります。
開発ツールの STM32CubeIDE をインストールするときに、VCPドライバもインストールされます。
もし、個別にVCPドライバをインストールする必要がある場合は、以下の要領でドライバを
入手してインストールします。
1) STMicroelectronics社のサイトにアクセスして、STM32 Virtual COM Port Driver の
STSW-STM32102 をダウロードします。
現在のバージョンは、1.5.0 です。en.stsw-stm32102_v1.5.0.zip がダウンロードされます。
2) en.stsw-stm32102_v1.5.0.zip を解凍します。
解凍されたファイルの中の VCP_V1.5.0_Setup_W7_x64_64bits.exe を実行して、
VCPドライバをインストールします。
PCアプリケーション Access_UART
サンプルプログラム N446RE_CDC を試験するためのPCアプリケーションです。
PCアプリケーション Access_UART の説明 をご覧ください。
A+-2C (ええ加減にC) のページに戻る
メールアドレス: apm2c.sumi@gmail.com
なんでも、気軽に ご相談ください。
担当:おの
えがおのでんし 案内