サンプルプログラム F405VG_ADC_DAC_MA の説明
STM32F405VG内蔵のADCとDACを使用して
A/D変換して入力したデータを
移動平均して、D/A変換出力するプログラムです。
サンプルプログラムの動作を確認するために
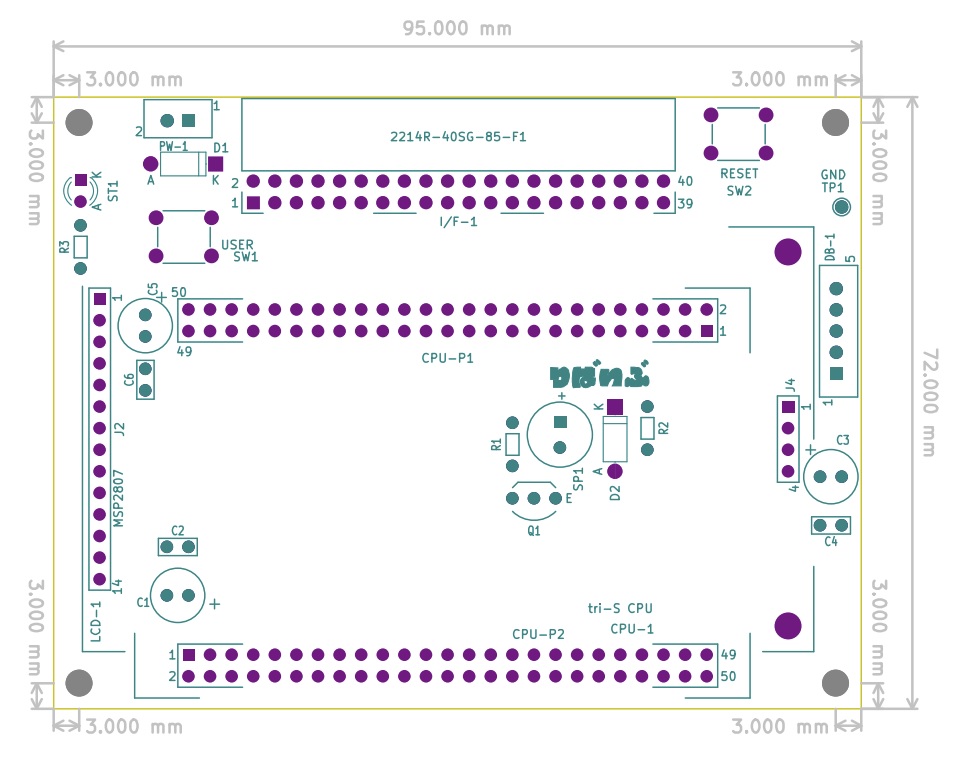
えがおのでんし製の評価用基板 Base-F405VG と
STMicroelectronics社のfreeの開発ツール、
STM32CubeIDE を使用しています。
えがおのでんし製の評価用基板 Base-F405VG には、STM32F405VGを実装した
えがおのでんし製の評価用CPU基板 tri-S CPU が搭載されています。
目次
概要
えがおのでんし製の評価用基板 Base-F405VG の説明
サンプルプログラム F405VG_ADC_DAC_MA のプロジェクト
サンプルプログラム F405VG_ADC_DAC_MA の説明
F405VG_ADC_DAC_MA の構成
F405VG_ADC_DAC_MA の動作パラメータの定義
ユーザープログラムの実行開始位置
F405VG_ADC_DAC_MA の main() の説明
1) 初期化の部分
2) LED点滅 と ADCとDACの処理(移動平均してD/A出力) の部分
ADCとDACの処理(移動平均してD/A出力) Transact_ADC_DAC_MA の説明
A/D変換データ取り込み の説明
移動平均処理 の説明
移動平均処理に使用している構造体
概要
サンプルプログラム F405VG_ADC_DAC_MAは
STM32F405VG内蔵のADCとDACを使用して
A/D変換して入力したデータを
移動平均して、D/A変換出力するプログラムです。
STM32F405VG内蔵のタイマ TIM4 と TIM6 により
それぞれ200uSec間隔のタイミングを作成します。
A/D変換には TIM4 を、D/A変換には TIM6 を使用します。
200uSec間隔でA/D変換を行い、1000個のデータを取り込みます。
その1000個のデータを移動平均して、200uSec間隔でD/A変換出力します。
1000個のデータを取り込む周期は 200mSec になります。
200mSec は、1000個のデータの移動平均処理をするのに、
十分な時間になっています。
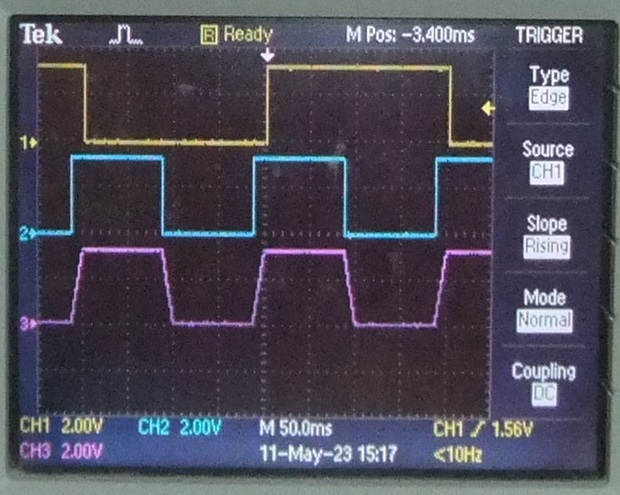
A/D信号は PB0 (ADC12_IN8) から入力します。
D/A信号は PA4 (DAC_OUT1) に出力しています。
また、1000個のA/D変換が終了するごとに、Low/Highを切り替える
Toggle信号を PA7 に出力しています。
えがおのでんし製の評価用基板 Base-F405VG の説明
このサンプルプログラムは、
えがおのでんし製の評価用基板 Base-F405VG を使用して動作を確認しています。
基板については、
Base-F405VG基板 の説明 をご覧ください。
サンプルプログラム F405VG_ADC_DAC_MA のプロジェクト
STM32CubeIDE 1.12.1 を使用して作成しました。
ここからサンプルプログラム W_F405VG_ADC_DAC_MA.zip をダウンロードしてください。
プロジェクト W_F405VG_ADC_DAC_MA は、
フォルダ C:\Work_CubeIDE\W_F405VG\W_F405VG_ADC_DAC_MA のように配置して作成しました。
フォルダ C:\Work_CubeIDE\W_F405VG を作成して、
そのフォルダに W_F405VG_ADC_DAC_MA.zip を貼り付けて解凍し、
プロジェクト作成時と同一に C:\Work_CubeIDE\W_F405VG\W_F405VG_ADC_DAC_MA と
配置した場合は、普通にプロジェクトを開くことができます。
サンプルプログラムのプロジェクトを任意のフォルダに配置した場合に、
STM32CubeIDEにより、そのプロジェクトを開く方法については
既存のプロジェクトを開く方法 をご覧ください。
サンプルプログラム F405VG_ADC_DAC_MA の説明
STM32F405VG内蔵のADCとDACを使用して
A/D変換して入力したデータを
移動平均して、D/A変換出力するプログラムです。
STM32F405VG内蔵のタイマ TIM4 と TIM6 により
それぞれ200uSec間隔のタイミングを作成します。
A/D変換には TIM4 を、D/A変換には TIM6 を使用します。
200uSec間隔でA/D変換を行い、1000個のデータを取り込みます。
その1000個のデータを移動平均して、200uSec間隔でD/A変換出力します。
1000個のデータを取り込む周期は 200mSec になります。
200mSec は、1000個のデータの移動平均処理をするのに、
十分な時間になっています。
A/D信号は PB0 (ADC12_IN8) から入力します。
D/A信号は PA4 (DAC_OUT1) に出力しています。
また、1000個のA/D変換が終了するごとに、Low/Highを切り替える
Toggle信号を PA7 に出力しています。
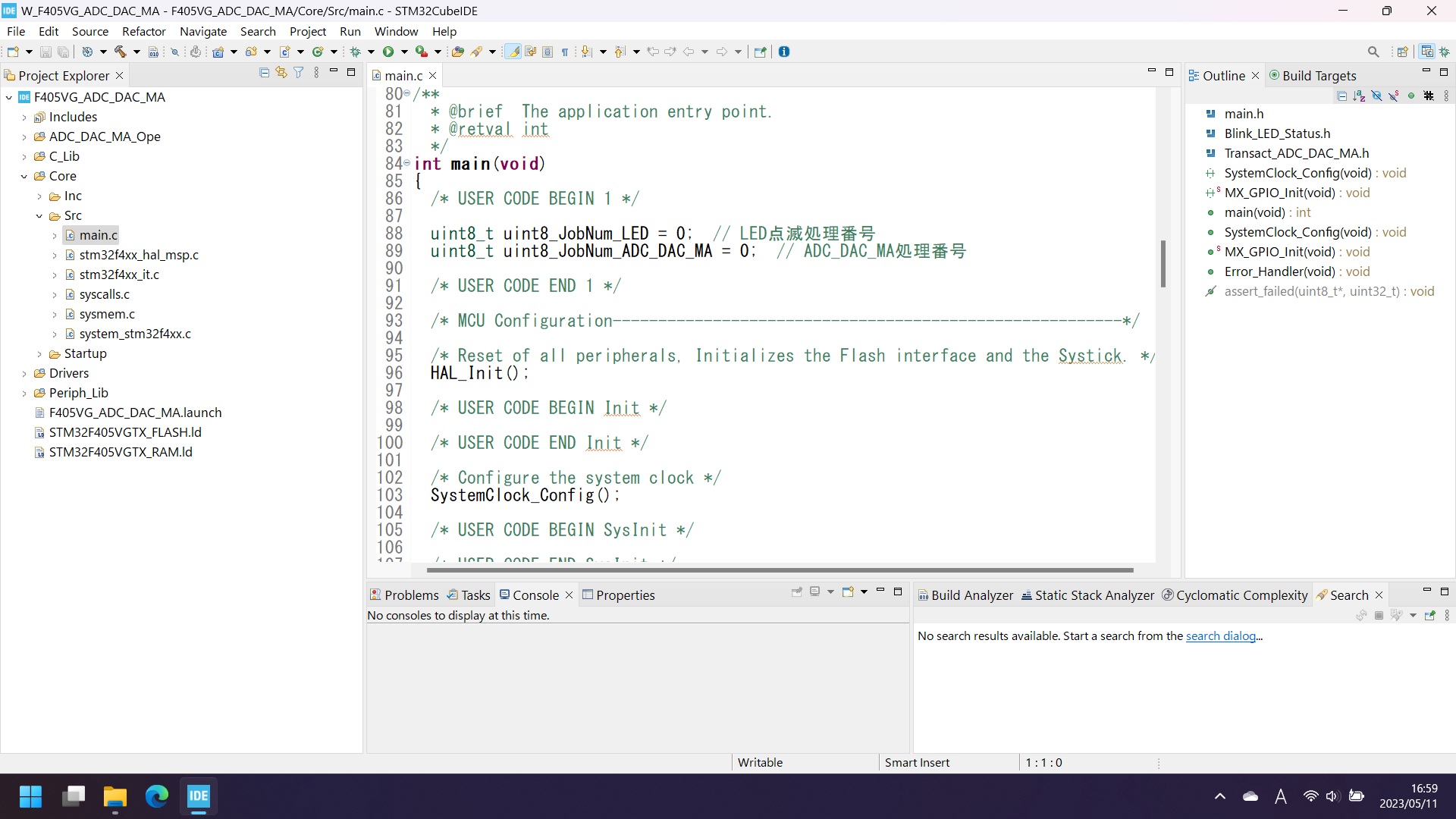
プロジェクトを最初に開いた画面は以下のようになります。
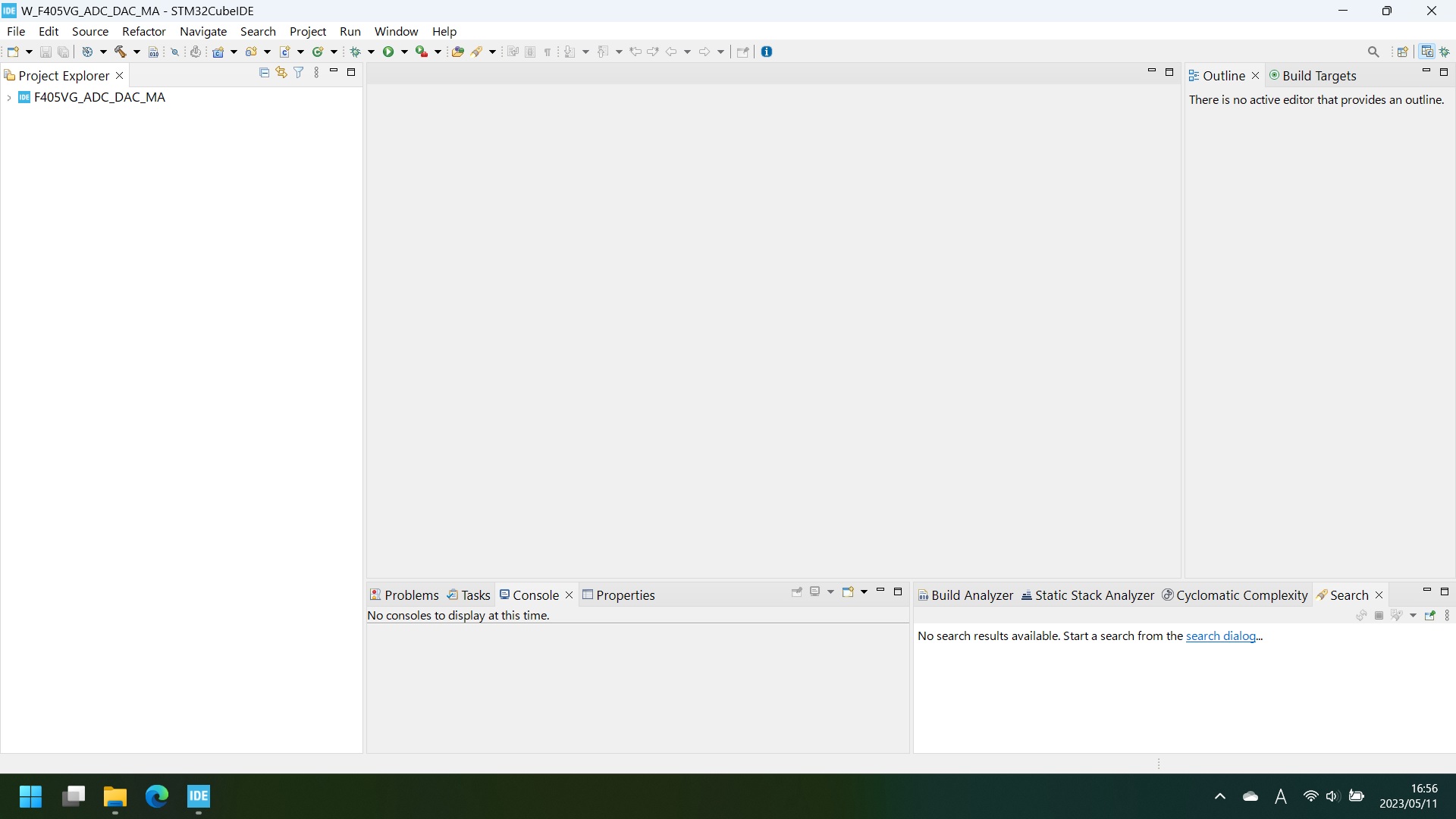
以下、サンプルプログラム F405VG_ADC_DAC_MA について説明していきます。
サンプルプログラムの構成
STM32CubeIDEの画面左側、Project Explorerの
F405VG_ADC_DAC_MAを展開した画面は以下のようになります。
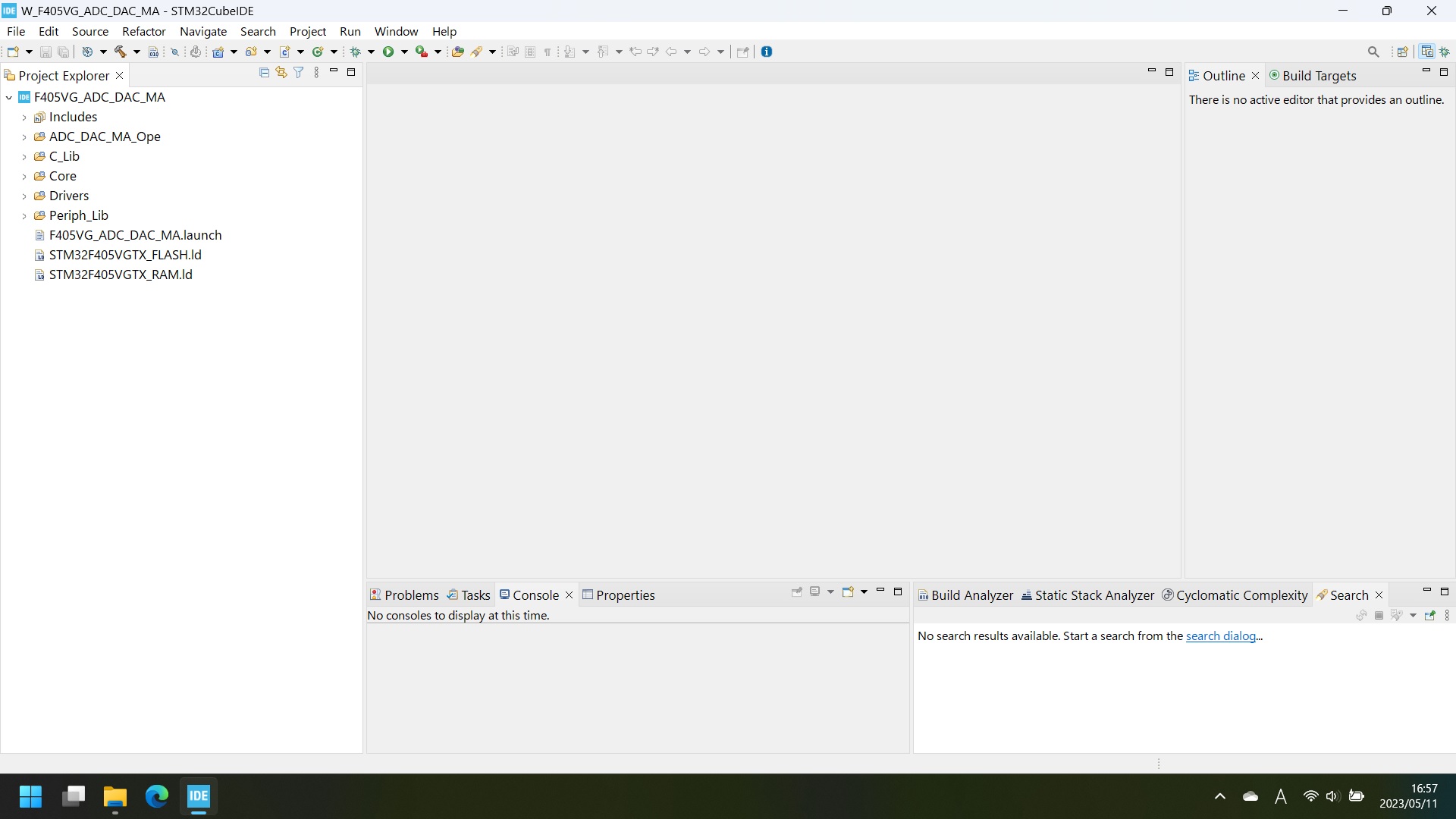
サンプルプログラム F405VG_ADC_DAC_MA の構成を以下に示します。
F405VG_ADC_DAC_MA
|
|- Includes
|
|- ADC_DAC_MA_Ope
| |- F405VG_ADC_DAC_MA_Config : 動作パラメータの定義
| | |- Dev_Conf.h
| |
| |- Moving_Average : 移動平均処理
| | |- Moving_Average.c
| | |- Moving_Average.h
| |
| |- Transact_ADC_DAC_MA : ADCとDACの処理(移動平均してD/A出力)
| |- Transact_ADC_DAC_MA.c
| |- Transact_ADC_DAC_MA.h
|
|- C_Lib
| |- User_IF_Lib
| | |- Blink_LED_Status : Status LED点滅処理
| | |- Blink_LED_Status.c
| | |- Blink_LED_Status.h
| |
| |- Wait_Interval : 時間待ち処理
| |- Wait_Interval.c
| |- Wait_Interval.h
|
|- Core
| |- Inc
| | |- main.h
| | |- stm32f4xx_hal_conf.h
| | |- stm32f4xx_it.h
| |
| |- Src
| | |- main.c
| | |- stm32f4xx_hal_msp.c
| | |- stm32f4xx_it.c : 割り込み処理
| | |- syscalls.c
| | |- system.c
| | |- system_stm32f4xx.c
| |
| |- Startup
|
|- Drivers
|
|- Periph_Lib
| |- Handle_F4 : 周辺インターフェースのハンドラ
| |- H_F4_ADC.c : ADC12_IN8 のハンドラ
| |- H_F4_ADC.h
| |- H_F4_DAC.c : DAC_OUT1 のハンドラ
| |- H_F4_DAC.h
| |- H_F4_TIM_4_6.c : TIM4 と TIM6 のハンドラ
| |- H_F4_TIM_4_6.h
|
|- F405VG_ADC_DAC_MA.launch
|- STM32F405VGTX_FLASH.ld
|- STM32F405VGTX_RAM.ld
F405VG_ADC_DAC_MA の動作パラメータの定義
サンプルプログラム F405VG_ADC_DAC_MA の 動作パラメータの定義を
ADC_DAC_MA_Ope/F405VG_ADC_DAC_MA_Config/Dev_Conf.h に記述しています。
使用する CPU の定義、ヘッダ名の定義、GPIO のポートとピンの定義、
および、使用するバッファのサイズ、移動平均数
などを記述しています。
ユーザープログラムの実行開始位置
プログラムは、int main(void) から実行開始します。
int main(void) は、フォルダ Core/Src/main.c にあります。
STM32CubeIDEでビルドされたプログラムは、自動的にCPUの初期化を
行った後、int main(void) を呼び出します。
ユーザーコード(記述したプログラム)は、
int main(void) の先頭から実行されます。
F405VG_ADC_DAC_MA の main ()の説明
サンプルプログラム F405VG_ADC_DAC_MA の main() の記述は、
以下のとおりです。
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t uint8_JobNum_LED = 0; // LED点滅処理番号
uint8_t uint8_JobNum_ADC_DAC_MA = 0; // ADC_DAC_MA処理番号
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//------------------------------------------------------
// Status LED点滅
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// uint16_t uint16_Time_ON : 点灯時間
// uint16_t uint16_Time_OFF : 消灯時間
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Blink_LED_Status(&uint8_JobNum_LED,
GLB_uint16_Time_LED_Status_ON,
GLB_uint16_Time_LED_Status_OFF);
//------------------------------------------------------
// ADCとDACの処理
//------------------------------------------------------
// A/D入力データを移動平均して、D/A出力する。
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Transact_ADC_DAC_MA(&uint8_JobNum_ADC_DAC_MA);
}
/* USER CODE END 3 */
}
1) 初期化の部分
a) CPUのPeripheral初期化
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
により、CPUのPeripheralなどの基本的な初期化を行います。
PeripheralとはCPUの周辺インターフェースなどのことを言います。
プロジェクト構築時に自動的に組み込まれる、
HAL Drivers(フォルダ Drivers/STM32F4xx_HAL_Drivers) 内に記述されています。
b) CPU動作クロックの設定
/* Configure the system clock */
SystemClock_Config();
CPUの動作クロックとPeripheralの動作クロックを設定します。
SystemClock_Config(); の設定内容は、
int main(void)
{
.
.
.
}
の、すぐ下に記述されています。
2) LED点滅 と ADCとDACの処理(移動平均してD/A出力) の部分
永久ループ部分の記述を以下に示します。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//------------------------------------------------------
// Status LED点滅
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// uint16_t uint16_Time_ON : 点灯時間
// uint16_t uint16_Time_OFF : 消灯時間
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Blink_LED_Status(&uint8_JobNum_LED,
GLB_uint16_Time_LED_Status_ON,
GLB_uint16_Time_LED_Status_OFF);
//------------------------------------------------------
// ADCとDACの処理
//------------------------------------------------------
// A/D入力データを移動平均して、D/A出力する。
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Transact_ADC_DAC_MA(&uint8_JobNum_ADC_DAC_MA);
}
/* USER CODE END 3 */
Status LED点滅処理 Blink_LED_Status と
ADCとDACの処理 Transact_ADC_DAC_MA を
呼び出しています。
Transact_ADC_DAC_MA では、
200uSec間隔でA/D変換を行い、1000個のデータを取り込み、
その1000個のデータを移動平均して、200uSec間隔でD/A変換出力しています。
Blink_LED_Status と Transact_ADC_DAC_MA は並列に実行されます。
ADCとDACの処理(移動平均してD/A出力) Transact_ADC_DAC_MA の説明
200uSec間隔でA/D変換したデータ 1000個 を取り込んだ後、
そのデータを移動平均して200uSec間隔で 1000個 D/A変換出力するのを繰り返します。
STM32F405VG内蔵のタイマ TIM4 と TIM6 により
それぞれ200uSec間隔のタイミングを作成します。
A/D変換には TIM4 を、D/A変換には TIM6 を使用します。
200uSec間隔でA/D変換を行い、1000個のデータを取り込みます。
その1000個のデータを移動平均して、200uSec間隔でD/A変換出力します。
1000個のデータを取り込む周期は 200mSec になります。
200mSec は、1000個のデータの移動平均処理をするのに、
十分な時間になっています。
A/D信号は PB0 (ADC12_IN8) から入力します。
D/A信号は PA4 (DAC_OUT1) に出力しています。
また、1000個のA/D変換が終了するごとに、Low/Highを切り替える
Toggle信号を PA7 に出力しています。
Transact_ADC_DAC_MA は
ADC_DAC_MA_Ope/Transact_ADC_DAC_MA/Transact_ADC_DAC_MA.c 内にあります。
以下に、Transact_ADC_DAC_MA のコードを示します。
//------------------------------------------------------
// ADCとDACの処理
//------------------------------------------------------
// A/D入力データを移動平均して、D/A出力する。
//------------------------------------------------------
// 引数:
// uint8_t *puint8_JobNum : 処理番号を格納する変数のポインタ
// 戻り値:
// -1 : 処理中
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
int16_t Transact_ADC_DAC_MA(uint8_t *puint8_JobNum)
{
static struct sMoving_Average STC_structMoving_Average;
int16_t int16_Return;
switch(*puint8_JobNum)
{
case 0:
//----------------------------------------------------
// 移動平均パラメータ初期化
//----------------------------------------------------
STC_structMoving_Average.int16_Status_First = 1; // 最初の1回目フラグ ON
STC_structMoving_Average.uint16_Count_MA = def_Count_MA; // 移動平均数セット
//----------------------------------------------------
//------------------------------------------------
// Toggle_SのGPIO初期化
//------------------------------------------------
Init_Toggle_S();
//--------------------------------
// TIM6初期化 : D/A変換のタイミングを設定
//--------------------------------
Init_TIM6();
//---------------------------
// DAC初期化
//---------------------------
Init_DAC();
//--------------------------------
// TIM4初期化 : A/D変換のタイミングを設定
//--------------------------------
Init_TIM4();
//---------------------------
// ADC初期化
//---------------------------
Init_ADC();
// Start ADC1 conversion process and enable DMA
if(HAL_ADC_Start_DMA(&hadc1,
(uint32_t *)GLB_uint16_Buf_ADC, def_Size_Buf_MA) != HAL_OK)
{
/* Start Error */
Error_Handler();
}
// Enable ADC1
if(HAL_ADC_Start(&hadc1) != HAL_OK)
{
/* Start Error */
Error_Handler();
}
(*puint8_JobNum)++; // 次の処理番号に移行する。 : case 1:
int16_Return = -1; // 処理継続
break;
case 1:
if(GLB_int16_Flag_ADC_End == 0){
// ADC変換が終了していない。
int16_Return = -1; // 処理継続
break; // 処理番号維持 : case 1: をループ
}
GLB_int16_Flag_ADC_End = 0; // ADC変換終了フラグ OFF
//------------------------------------------------
// Toggle_S信号の Low/High を交互に切り替える。
//------------------------------------------------
Toggle_S();
GLB_int16_Flag_Get_ADC = 1; // ADCデータ取得フラグ ON
(*puint8_JobNum)++; // 次の処理番号に移行する。 : case 2:
int16_Return = -1; // 処理継続
break;
case 2:
//--------------------------------------------------
// ここに、A/D変換データに対する処理を記述してください。
//--------------------------------------------------
GLB_int16_Flag_Get_ADC = 0; // ADCデータ取得フラグ OFF
//------------------------------------------------
// AD変換回数をチェック
//------------------------------------------------
if(GLB_int16_Times_AD < 1){
GLB_int16_Times_AD ++;
*puint8_JobNum = 1; // 処理番号 1 に移行する : case 1:
int16_Return = -1; // 処理継続
break;
}
//------------------------------------------------------
// 移動平均処理
//------------------------------------------------------
// 引数:
// struct sMoving_Average *pstructMoving_Average
// : 移動平均のための構造体のポインタ
// uint16_t *puint16_Data : 入力データのポインタ
// 戻り値:
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
Moving_Average(&STC_structMoving_Average,
GLB_uint16_Buf_ADC_CH8);
//------------------------------
// DAC_OUT1
//------------------------------
// Enable DAC selected channel and associated DMA
if (HAL_DAC_Start_DMA(&hdac, DAC_CHANNEL_1,
(uint32_t *)STC_structMoving_Average.uint16_Buf_MA,
def_Size_Buf_MA,
DAC_ALIGN_12B_R) != HAL_OK)
{
// Start DMA Error
}
*puint8_JobNum = 1; // 処理番号 1 に移行する : case 1:
int16_Return = -1; // 処理継続
break;
default:
*puint8_JobNum = 0; // 処理番号初期化
int16_Return = 1; // NG終了
break;
}
return(int16_Return);
}
1) case 0:
a) A/D変換データを 1000個取り込むごとにLow/High出力を
切り替える Togle信号のGPIOの初期化を行います。
b) TIM6 と DAC_OUT1 の初期化を行います。
c) TIM4 と ADC12_IN8 の初期化を行います。
d) DMAによる1000個のA/D変換を開始します。
1000個のA/D変換は繰り返し行われます。
1000個のA/D変換が終了すると割り込みが発生します。
その割り込みでは、A/D変換終了フラグ GLB_int16_Flag_ADC_End を
1にセットします。
e) 処理番号をインクリメントします。
処理は、case 1: に移行します。
2) case 1:
a) A/D変換終了フラグ GLB_int16_Flag_ADC_End が
1 になるのを待ちます。
0 の場合は、case 1: をループします。
b) A/D変換終了フラグ GLB_int16_Flag_ADC_End が
1 になったら、GLB_int16_Flag_ADC_End を
0 に戻します。
c) Toggle信号の Low/High を切り替えます。
d) 処理番号をインクリメントします。
処理は、case 2: に移行します。
3) case 2:
a) A/D変換回数をチェックします。
最初の1回目の場合、処理番号を 1 にセットして、case 1: に移行します。
2回目以降の場合、以下の処理を行います。
b) A/D変換データ 1000個 に対して、移動平均処理を行います。
c) 1000個の移動平均データのD/A変換をDMAにより開始します。
d) 処理番号を 1 にセットして、case 1: に移行します。
Transact_ADC_DAC_MA は、case 1: と case 2: を繰り返し実行します。
A/D変換データ取り込み の説明
DMAにより、1000個のA/D変換データが入力されると割り込みが発生します。
その割り込み内で、ADCデータをバッファにセットするモジュール
void Set_ADC_Data(void) が呼び出されます。
void Set_ADC_Data(void) のコードを以下に示します。
//--------------------------------------
// ADCデータをバッファにセット
//--------------------------------------
void Set_ADC_Data(void)
{
int16_t int16_I;
int16_t int16_Position;
int16_Position = def_Size_Buf_MA * GLB_int16_Position_AD;
for(int16_I = 0; int16_I < def_Size_Buf_MA; int16_I++){
GLB_uint16_Buf_ADC_CH8[int16_Position + int16_I] = GLB_uint16_Buf_ADC[int16_I];
}
// A/Dデータ格納位置更新
GLB_int16_Position_AD++;
if(GLB_int16_Position_AD > def_Max_Point_Buf_ADC_CH8){
GLB_int16_Position_AD = 0;
}
}
A/D変換データは、バッファ GLB_uint16_Buf_ADC_CH8[3000] の配列にセットされます。
最初の1回目の割り込みでは、A/D変換データ 1000個が
GLB_uint16_Buf_ADC_CH8[0] - GLB_uint16_Buf_ADC_CH8[999] にセットされます。
2回目は、GLB_uint16_Buf_ADC_CH8[1000] - GLB_uint16_Buf_ADC_CH8[1999] に
3回目は、GLB_uint16_Buf_ADC_CH8[2000] - GLB_uint16_Buf_ADC_CH8[2999] に
セットされます。
その次は、再び、
GLB_uint16_Buf_ADC_CH8[0] - GLB_uint16_Buf_ADC_CH8[999] に戻り、
その後、
GLB_uint16_Buf_ADC_CH8[1000] - GLB_uint16_Buf_ADC_CH8[1999]
GLB_uint16_Buf_ADC_CH8[2000] - GLB_uint16_Buf_ADC_CH8[2999]
にセットするのを繰り返します。
移動平均処理は、最初の2回目の
GLB_uint16_Buf_ADC_CH8[1000] - GLB_uint16_Buf_ADC_CH8[1999]
にデータがセットされた後に開始されます。
その後は、1000個セットされるごとに、移動平均処理を行います。
移動平均処理 の説明
移動平均処理は
フォルダ ADC_DAC_MA_Ope\Moving_Average\Moving_Average.c 内に
記述されています。
Moving_Average のコードを以下に示します。
//------------------------------------------------------
// 移動平均処理
//------------------------------------------------------
// 引数:
// struct sMoving_Average *pstructMoving_Average
// : 移動平均のための構造体のポインタ
// uint16_t *puint16_Data : 入力データのポインタ
// 戻り値:
// 0 : OK終了
// 1 : NG
//------------------------------------------------------
int16_t Moving_Average(struct sMoving_Average *pstructMoving_Average,
uint16_t *puint16_Data)
{
int16_t int16_I;
// 最初の1回目フラグをチェック
if(pstructMoving_Average->int16_Status_First == 1){
// 最初の1回目フラグが ON の場合
pstructMoving_Average->uint32_Total = 0; // 加算値クリア
pstructMoving_Average->uint16_Position_Old = 0; // 一番古いデータ位置
pstructMoving_Average->uint16_Position_Now
= pstructMoving_Average->uint16_Count_MA; // 現在のデータ位置
// データ先頭の移動平均数分を加算 および 先頭部分の移動平均データをセット
for(int16_I = 0; int16_I < pstructMoving_Average->uint16_Count_MA; int16_I++){
pstructMoving_Average->uint32_Total += puint16_Data[int16_I];
pstructMoving_Average->uint16_Buf_MA[int16_I] = puint16_Data[int16_I];
}
pstructMoving_Average->uint16_Position_MA
= pstructMoving_Average->uint16_Count_MA; // 移動平均値格納位置をセット
pstructMoving_Average->int16_Status_First = 0; // 最初の1回目フラグ クリア
}
// 移動平均処理
for(int16_I = 0; int16_I < def_Size_Buf_MA; int16_I++){
// 最初の1回目フラグが OFF の場合
pstructMoving_Average->uint32_Total
-= puint16_Data[pstructMoving_Average->uint16_Position_Old];
// 一番古いデータを減算
pstructMoving_Average->uint32_Total
+= puint16_Data[pstructMoving_Average->uint16_Position_Now];
// 新しいデータを加算
// 移動平均値をセット
pstructMoving_Average->uint16_Buf_MA[pstructMoving_Average->uint16_Position_MA]
= (uint16_t)(pstructMoving_Average->uint32_Total / (uint32_t)pstructMoving_Average->uint16_Count_MA);
// 移動平均値格納位置を更新
pstructMoving_Average->uint16_Position_MA++;
if(pstructMoving_Average->uint16_Position_MA >= def_Size_Buf_MA){
pstructMoving_Average->uint16_Position_MA = 0;
}
// 一番古いデータ位置を更新
pstructMoving_Average->uint16_Position_Old++;
if(pstructMoving_Average->uint16_Position_Old >= def_Size_Buf_ADC){
pstructMoving_Average->uint16_Position_Old = 0;
}
// 新しいデータ位置を更新
pstructMoving_Average->uint16_Position_Now++;
if(pstructMoving_Average->uint16_Position_Now >= def_Size_Buf_ADC){
pstructMoving_Average->uint16_Position_Now = 0;
}
}
return(0); // OK
}
移動平均処理に使用している構造体
移動平均処理に構造体を使用しています。
フォルダ ADC_DAC_MA_Ope\Moving_Average\Moving_Average.h 内に
記述されています。
構造体を以下に示します。
//--------------------------------------------------------------
// 移動平均のための構造体
//--------------------------------------------------------------
struct sMoving_Average{
int16_t int16_Status_First; // 最初の1回目フラグ
uint16_t uint16_Count_MA; // 移動平均数
uint16_t uint16_Position_Old; // 一番古いデータ位置
uint16_t uint16_Position_Now; // 現在のデータ位置
uint32_t uint32_Total; // 加算値
uint16_t uint16_Position_MA; // 移動平均値格納位置
uint16_t uint16_Buf_MA[def_Size_Buf_MA]; // 移動平均結果用Buffer
};
//--------------------------------------------------------------
A+-2C (ええ加減にC) のページに戻る
メールアドレス: apm2c.sumi@gmail.com
なんでも、気軽に ご相談ください。
担当:おの

えがおのでんし 案内